如何使用deepseek联合anaconda帮Pycharm快速装配环境
以下以deepseek生成的随机迷宫生成与求解为例子
下面是一个使用Pygame创建随机迷宫生成和可视化求解的程序。这个程序会生成随机迷宫,然后用深度优先搜索算法找到从起点到终点的路径。
import pygame
import random
import time
import sys
# 初始化pygame
pygame.init()
# 常量定义
WIDTH, HEIGHT = 800, 600
CELL_SIZE = 20
ROWS, COLS = HEIGHT // CELL_SIZE, WIDTH // CELL_SIZE
FPS = 60
# 颜色定义
BLACK = (0, 0, 0)
WHITE = (255, 255, 255)
RED = (255, 0, 0)
GREEN = (0, 255, 0)
BLUE = (0, 0, 255)
PURPLE = (128, 0, 128)
# 创建屏幕
screen = pygame.display.set_mode((WIDTH, HEIGHT))
pygame.display.set_caption("随机迷宫生成与求解")
clock = pygame.time.Clock()
class Cell:
def __init__(self, row, col):
self.row = row
self.col = col
self.walls = {'top': True, 'right': True, 'bottom': True, 'left': True}
self.visited = False
def draw(self):
x = self.col * CELL_SIZE
y = self.row * CELL_SIZE
if self.visited:
pygame.draw.rect(screen, WHITE, (x, y, CELL_SIZE, CELL_SIZE))
if self.walls['top']:
pygame.draw.line(screen, BLACK, (x, y), (x + CELL_SIZE, y), 2)
if self.walls['right']:
pygame.draw.line(screen, BLACK, (x + CELL_SIZE, y), (x + CELL_SIZE, y + CELL_SIZE), 2)
if self.walls['bottom']:
pygame.draw.line(screen, BLACK, (x, y + CELL_SIZE), (x + CELL_SIZE, y + CELL_SIZE), 2)
if self.walls['left']:
pygame.draw.line(screen, BLACK, (x, y), (x, y + CELL_SIZE), 2)
def get_neighbors(self, grid):
neighbors = []
# 上
if self.row > 0 and not grid[self.row - 1][self.col].visited:
neighbors.append(grid[self.row - 1][self.col])
# 右
if self.col < COLS - 1 and not grid[self.row][self.col + 1].visited:
neighbors.append(grid[self.row][self.col + 1])
# 下
if self.row < ROWS - 1 and not grid[self.row + 1][self.col].visited:
neighbors.append(grid[self.row + 1][self.col])
# 左
if self.col > 0 and not grid[self.row][self.col - 1].visited:
neighbors.append(grid[self.row][self.col - 1])
return neighbors
def remove_walls(current, next_cell):
# 移除当前单元格和下一个单元格之间的墙
dx = current.col - next_cell.col
dy = current.row - next_cell.row
if dx == 1: # 下一个在左边
current.walls['left'] = False
next_cell.walls['right'] = False
elif dx == -1: # 下一个在右边
current.walls['right'] = False
next_cell.walls['left'] = False
elif dy == 1: # 下一个在上边
current.walls['top'] = False
next_cell.walls['bottom'] = False
elif dy == -1: # 下一个在下边
current.walls['bottom'] = False
next_cell.walls['top'] = False
def generate_maze():
# 创建网格
grid = [[Cell(row, col) for col in range(COLS)] for row in range(ROWS)]
# 从随机单元格开始
current = grid[random.randint(0, ROWS-1)][random.randint(0, COLS-1)]
current.visited = True
stack = [current]
# 生成迷宫
while stack:
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
screen.fill(WHITE)
# 绘制所有单元格
for row in grid:
for cell in row:
cell.draw()
# 绘制当前单元格
pygame.draw.rect(screen, RED,
(current.col * CELL_SIZE, current.row * CELL_SIZE,
CELL_SIZE, CELL_SIZE))
pygame.display.flip()
clock.tick(FPS)
# 获取未访问的邻居
neighbors = current.get_neighbors(grid)
if neighbors:
# 随机选择一个邻居
next_cell = random.choice(neighbors)
next_cell.visited = True
# 移除墙壁
remove_walls(current, next_cell)
# 将当前单元格推入堆栈
stack.append(current)
# 将下一个单元格设为当前单元格
current = next_cell
elif stack:
# 回溯
current = stack.pop()
return grid
def solve_maze(grid):
# 使用深度优先搜索解决迷宫
start = grid[0][0]
end = grid[ROWS-1][COLS-1]
stack = [start]
visited = set()
visited.add((start.row, start.col))
path = []
while stack:
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
current = stack[-1]
# 如果到达终点
if current == end:
break
# 查找可移动的邻居
neighbors = []
# 上
if current.row > 0 and not current.walls['top']:
neighbor = grid[current.row - 1][current.col]
if (neighbor.row, neighbor.col) not in visited:
neighbors.append(neighbor)
# 右
if current.col < COLS - 1 and not current.walls['right']:
neighbor = grid[current.row][current.col + 1]
if (neighbor.row, neighbor.col) not in visited:
neighbors.append(neighbor)
# 下
if current.row < ROWS - 1 and not current.walls['bottom']:
neighbor = grid[current.row + 1][current.col]
if (neighbor.row, neighbor.col) not in visited:
neighbors.append(neighbor)
# 左
if current.col > 0 and not current.walls['left']:
neighbor = grid[current.row][current.col - 1]
if (neighbor.row, neighbor.col) not in visited:
neighbors.append(neighbor)
if neighbors:
# 选择第一个邻居
next_cell = neighbors[0]
visited.add((next_cell.row, next_cell.col))
stack.append(next_cell)
# 绘制路径
screen.fill(WHITE)
for row in grid:
for cell in row:
cell.draw()
# 绘制路径
for i, cell in enumerate(stack):
color = (0, int(255 * i / len(stack)), 255)
pygame.draw.rect(screen, color,
(cell.col * CELL_SIZE, cell.row * CELL_SIZE,
CELL_SIZE, CELL_SIZE))
pygame.display.flip()
clock.tick(10) # 减慢求解速度以便观察
else:
# 回溯
stack.pop()
return stack
def main():
# 生成迷宫
grid = generate_maze()
# 等待用户按键开始求解
waiting = True
while waiting:
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
sys.exit()
if event.type == pygame.KEYDOWN:
if event.key == pygame.K_SPACE:
waiting = False
# 解决迷宫
path = solve_maze(grid)
# 显示最终路径
screen.fill(WHITE)
for row in grid:
for cell in row:
cell.draw()
for cell in path:
pygame.draw.rect(screen, GREEN,
(cell.col * CELL_SIZE, cell.row * CELL_SIZE,
CELL_SIZE, CELL_SIZE))
# 标记起点和终点
pygame.draw.rect(screen, BLUE,
(0, 0, CELL_SIZE, CELL_SIZE))
pygame.draw.rect(screen, PURPLE,
((COLS-1) * CELL_SIZE, (ROWS-1) * CELL_SIZE,
CELL_SIZE, CELL_SIZE))
pygame.display.flip()
# 等待用户关闭窗口
running = True
while running:
for event in pygame.event.get():
if event.type == pygame.QUIT:
running = False
pygame.quit()
if __name__ == "__main__":
main()
1.利用deepseek为上述代码生成对应的requirements.txt文件
为上述代码生成 requirements.txt 文件,内容如下:
pygame==2.5.2
讲上如内容保存至requirements.txt文件中,如下所示:
2.利用anaconda配置对应环境
1.打开Anaconda创建对应的环境名称
(注:此处原有微信图片,请手动添加 Anaconda 创建环境的截图)
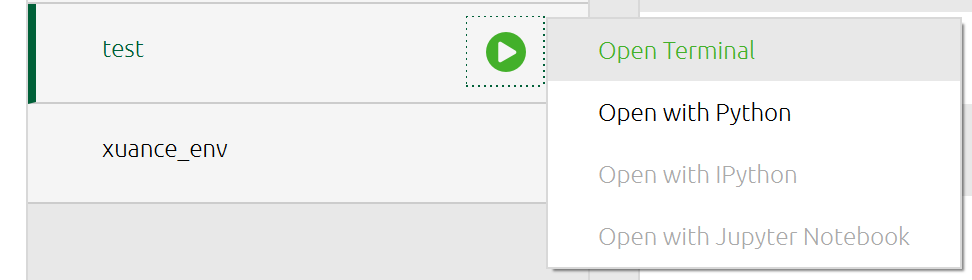
2.环境名称安装完成后对环境进行配置
点击Open Terminal
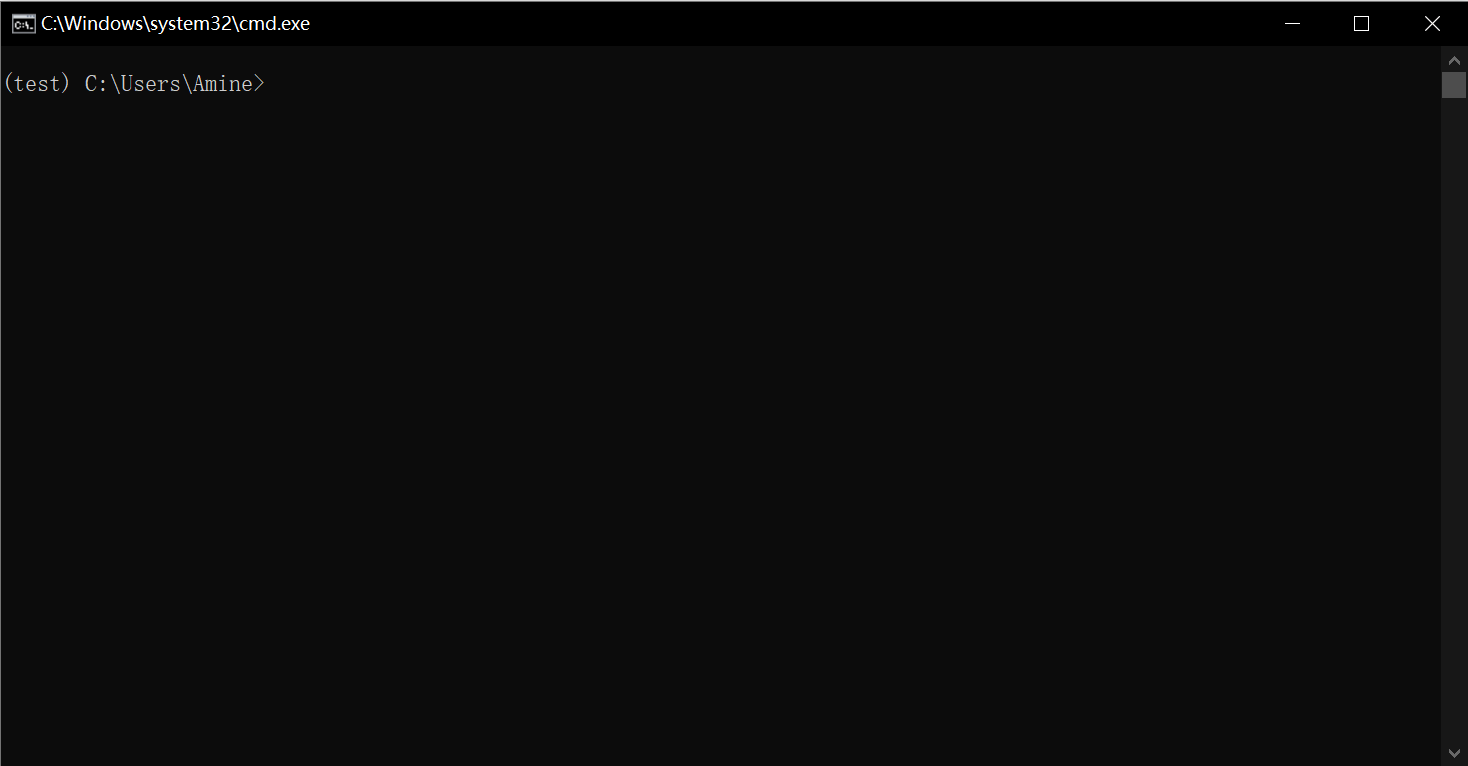
回退到你所保存requirements.txt文件所在的文件夹,如图所示,该文件所在地址为:C:\Users\Amine\Desktop\test_py
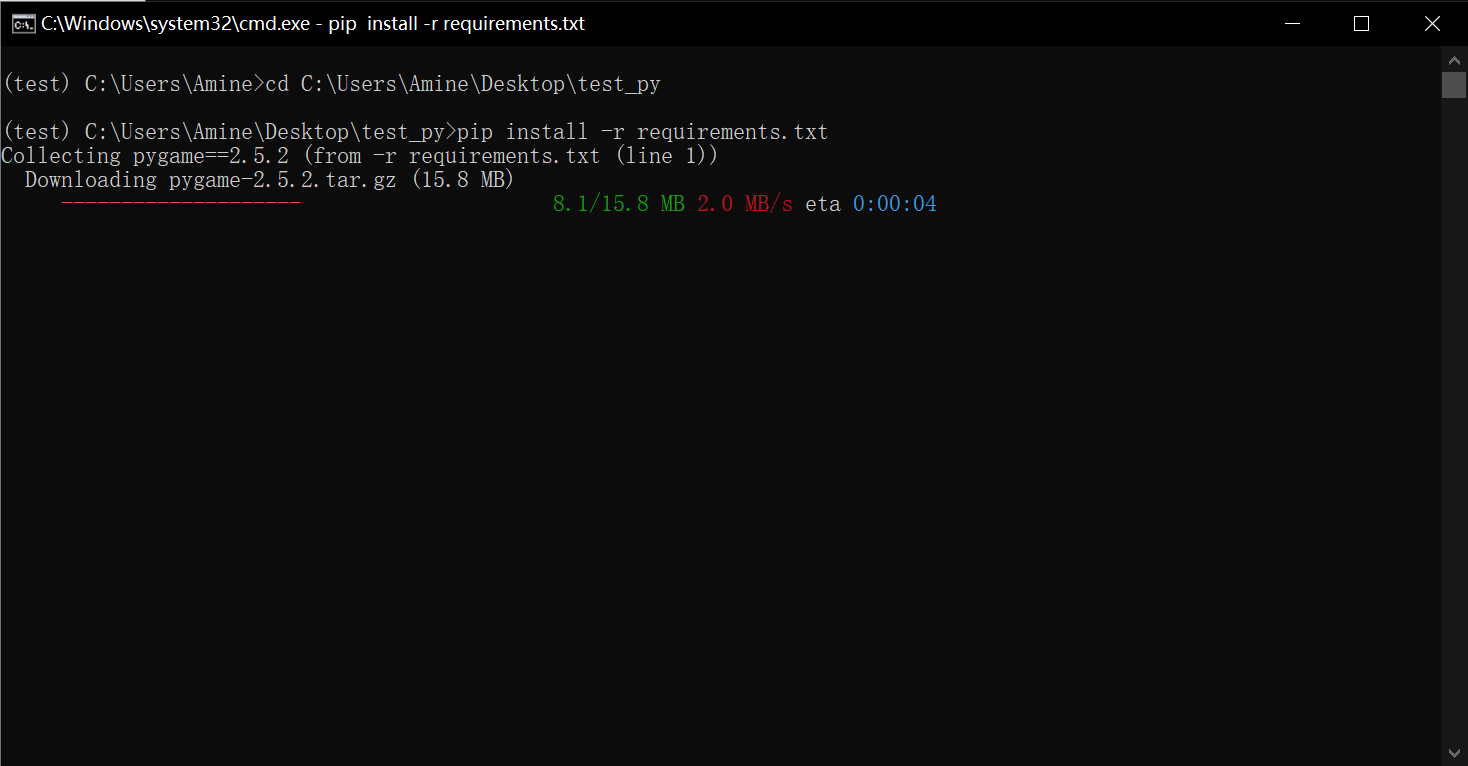
在terminal中输入cd C:\Users\Amine\Desktop\test_py
再次输入pip install -r requirements.txt就开始配置环境啦
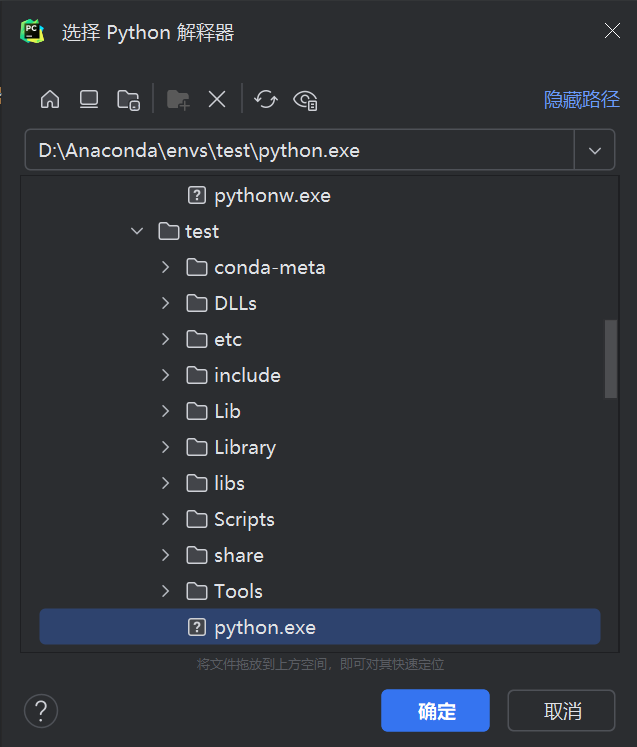
3.在pycharm中寻找对应的环境配置器
1.点击files-settings-projects-pycharm解释器
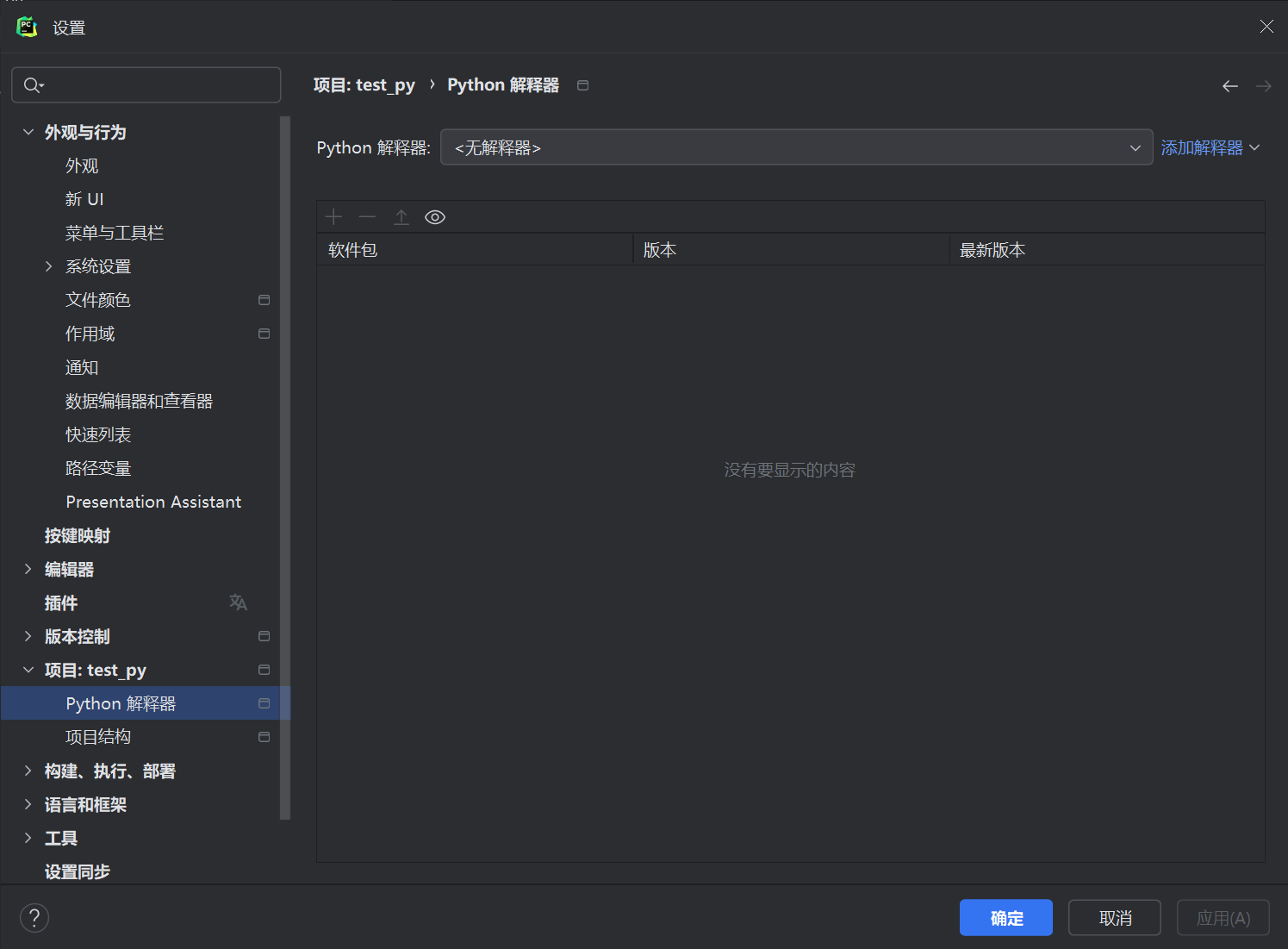
2.点击添加解释器-添加本地解释器-现有-…(框框后的省略号),再去查找你所配置的环境的位置即可